- Memahami prinsip kerja PWM pada mikrokontroler
- Memahami prinsip kerja ADC pada mikrokontroler
- Menggunakan PWM dan ADC pada Arduino







- Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
- Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC.
- Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
- Bekerja pada tegangan 4 sampai 30 volt.
- Memiliki arus rendah yaitu kurang dari 60 µA.
- Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
- Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
- Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
- Tegangan output sensor suhu IC LM35 dapat diformulasikan sebagai berikut :
Vout LM35 = Temperature º x 10 mV

Keterangan:
1. Film dengan polarizing filter vertical untuk memolarisasi cahaya yang masuk.
2. Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).
3. Twisted nematic liquid crystal (kristal cair dengan susunan terpilin).
4. Glass substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).
5. Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah tersedia.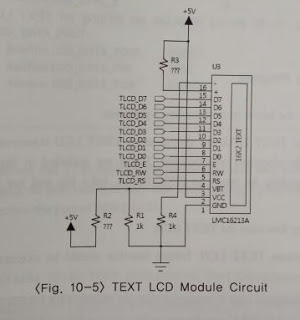


Simbol Motor DC

Gambar 18. Simbol Motor DC
Motor DC tersusun dari dua bagian yaitu bagian diam (stator) dan bagian bergerak (rotor). Stator motor arus searah adalah badan motor atau kutub magnet (sikat-sikat), sedangkan yang termasuk rotor adalah jangkar lilitanya. Pada motor, kawat penghantar listrik yang bergerak tersebut pada dasarnya merupakan lilitan yang berbentuk persegi panjang yang disebut kumparan.

Gambar 19. Prinsip Kerja Motor DC
Kumparan ABCD terletak dalam medan magnet serba sama dengan kedudukan sisi aktif AD dan CB yang terletak tepat lurus arah fluks magnet. Sedangkan sisi AB dan DC ditahan pada bagian tengahnya, sehingga apabila sisi AD dan CB berputar karena adanya gaya lorentz, maka kumparan ABCD akan berputar.
T = F.r
Dimana :
T = momen putar (Nm) F = gaya tolak (newton)
r = jarak sisi kumparan pada sumbu putar (meter)
Pada daerah dibawah kutub-kutub magnet besarnya momen putar tetap karena besarnya gaya lorentz. Hal ini berarti bahwa kedudukan garis netral sisi sisi kumparan akan berhenti berputar. Supaya motor dapat berputar terus dengan baik, maka perlu ditambah jumlah kumparan yang digunakan. Kumparan- kumparan harus diletakkan sedemikian rupa sehingga momen putar yang dialami setiap sisi kumparan akan saling membantu dan menghasilkan putaran yang baik. Dengan pertimbangan teknis, maka kumparan-kumparan yang berputar tersebut dililitkan pada suatu alat yang disebut jangkar, sehingga lilitan kumparan itupun disebut lilitan jangkar. Struktur Motor DC dapat dilihat pada gambar berikut ini.

Seperti yang dikatakan sebelumnya, nilai Resistor yang berbentuk Axial adalah diwakili oleh Warna-warna yang terdapat di tubuh (body) Resistor itu sendiri dalam bentuk Gelang. Umumnya terdapat 4 Gelang di tubuh Resistor, tetapi ada juga yang 5 Gelang.
Gelang warna Emas dan Perak biasanya terletak agak jauh dari gelang warna lainnya sebagai tanda gelang terakhir. Gelang Terakhirnya ini juga merupakan nilai toleransi pada nilai Resistor yang bersangkutan.
Tabel dibawah ini adalah warna-warna yang terdapat di Tubuh Resistor :

Tabel Kode Warna Resistor
Perhitungan untuk Resistor dengan 4 Gelang warna :

Cara menghitung nilai resistor 4 gelang
Masukkan angka langsung dari kode warna Gelang ke-1 (pertama)
Masukkan angka langsung dari kode warna Gelang ke-2
Masukkan Jumlah nol dari kode warna Gelang ke-3 atau pangkatkan angka tersebut dengan 10 (10n)
Merupakan Toleransi dari nilai Resistor tersebut
Contoh :
Gelang ke 1 : Coklat = 1
Gelang ke 2 : Hitam = 0
Gelang ke 3 : Hijau = 5 nol dibelakang angka gelang ke-2; atau kalikan 105
Gelang ke 4 : Perak = Toleransi 10%
Maka nilai Resistor tersebut adalah 10 * 105 = 1.000.000 Ohm atau 1 MOhm dengan toleransi 10%.
Perhitungan untuk Resistor dengan 5 Gelang warna :

Cara Menghitung Nilai Resistor 5 Gelang Warna
Masukkan angka langsung dari kode warna Gelang ke-1 (pertama)
Masukkan angka langsung dari kode warna Gelang ke-2
Masukkan angka langsung dari kode warna Gelang ke-3
Masukkan Jumlah nol dari kode warna Gelang ke-4 atau pangkatkan angka tersebut dengan 10 (10n)
Merupakan Toleransi dari nilai Resistor tersebut
Contoh :
Gelang ke 1 : Coklat = 1
Gelang ke 2 : Hitam = 0
Gelang ke 3 : Hijau = 5
Gelang ke 4 : Hijau = 5 nol dibelakang angka gelang ke-2; atau kalikan 105
Gelang ke 5 : Perak = Toleransi 10%
Maka nilai Resistor tersebut adalah 105 * 105 = 10.500.000 Ohm atau 10,5 MOhm dengan toleransi 10%.
Contoh-contoh perhitungan lainnya :
Merah, Merah, Merah, Emas → 22 * 10² = 2.200 Ohm atau 2,2 Kilo Ohm dengan 5% toleransi
Kuning, Ungu, Orange, Perak → 47 * 10³ = 47.000 Ohm atau 47 Kilo Ohm dengan 10% toleransi
Cara menghitung Toleransi :
2.200 Ohm dengan Toleransi 5% =
2200 – 5% = 2.090
2200 + 5% = 2.310
ini artinya nilai Resistor tersebut akan berkisar antara 2.090 Ohm ~ 2.310 Ohm

Arduino Uno
Bagian-bagian arduino uno:
-Power USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
-Power jack
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
-Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
-Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
-Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
-Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
-LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
Bagian - bagian pendukung:
-RAM
RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic Random Acces Memory).
-ROM
ROM (Read-only Memory) adalah perangkat keras pada computer yang dapat menyimpan data secara permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dari Mask ROM, PROM, EPROM, EEPROM.
Block Diagram Mikrokontroler ATMega 328P pada Arduino UNO
Adapun block diagram mikrokontroler ATMega 328P dapat dilihat pada gambar berikut:


b) Pulse Width Modulation

c) Analog to Digital Converter




#include <LiquidCrystal.h> //Deklarasi library LCD
#define LM35 A0 //Deklarasi pin A0 untuk LM35
LiquidCrystal lcd(2,3,4,5,6,7); //Deklarasi pin 2-7 untuk LCD
int nilaiSuhu; //Deklarasi variabel nilaiSuhu
int LED = 9;
int motorIn1 = 11;
int motorIn2 = 10;
void setup() { //Semua kode dalam fungsi ini dieksekusi sekali
pinMode(A0, INPUT); //Deklarasi pin A0 sebagai OUTPUT
lcd.begin(16,2); //Dimensi LCD yang digunakan
pinMode (LED,OUTPUT);
pinMode (motorIn1, OUTPUT);
pinMode (motorIn2, OUTPUT);
}
void loop() //Semua kode dalam fungsi ini dieksekusi berulang
{
nilaiSuhu=((5*analogRead(LM35)*100.00)/1024); //Mencari nilai Suhu
if (nilaiSuhu == 36) {
digitalWrite (LED,HIGH);
digitalWrite (motorIn1,HIGH);
digitalWrite (motorIn2,LOW);
lcd.clear(); //Menghapus layar LCD
lcd.setCursor(0,0); //Menentukan posisi kursor pada awal penulisan
lcd.print("Suhu Normal"); //Menampilkan text pada LCD
lcd.setCursor(0,1); //Menentukan posisi kursor pada awal penulisan
lcd.print(nilaiSuhu); //Menampilkan nilaiSuhu pada LCD
delay(10000);
}
else {
digitalWrite (LED,LOW);
digitalWrite (motorIn1,LOW);
digitalWrite (motorIn2,LOW);
lcd.clear(); //Menghapus layar LCD
lcd.setCursor(0,0); //Menentukan posisi kursor pada awal penulisan
lcd.print("LM35 Sensor Suhu"); //Menampilkan text pada LCD
lcd.setCursor(0,1); //Menentukan posisi kursor pada awal penulisan
lcd.print(nilaiSuhu); //Menampilkan nilaiSuhu pada LCD
delay(100); //Waktu delay 100 ms setelah dieksekusi
}
}

1.
1. Bagaimana cara memutar motor jika bergerak
kekiri? Jelaskan!
Jawab:
Untuk mengubah atau mengatur gerak motor sehingga berputar kearah kiri, maka kita perlu mengubah inputan pada kaki Arduino (pin 10,11) yang terhubung pada motor. Pada program sebelumnya Ketika suhu 26 derajat motor berputar ke kanan yang diatur oleh variable “motorIn1 = HIGH” dan “motorI2 = LOW”. Jika kita ingin membuat motor berputar ke kiri maka programnya menjadi “motorIn1 = LOW” dan “motorIn2 = HIGH”.
2.
2. Jika motor dihubungkan ke pin A2, apa yang akan
terjadi pada motor? Bandingkan Analisa dari program dengan pengertian motor
secara umum!
Jawab:
Ketika motor dihubungkan ke pin A2 (pin Analog) pada Arduino, motor akan akan tetap hidup. Hal ini sesuai dengan prinsip kerja motor secara umum yang akan berputar atau bergerak jika terdapat energi listrik. Motor ini dapat bekerja baik dengan inputan sinyal analog maupun sinyal digital, karena kedua sinyal ini tetap mengeluarkan tegangan. Yang membedakannya hanyalah pada sinyal digital hanya menggunakan logika 1 atau 0.
3.
3. Jika sensor dihubungkan ke pin digital (pin 12),
apa yang akan terjadi pada rangkaian?
Jawab:
Jika sensor dihubungkan ke pin digital, LED akan mati, motor
mati, dan LCD tidak menampilkan suhu. Hal ini dikarenakan LM 35 merupakan
sensor yang membutuhkan keakuratan dalam outputnya (menggunakan angka) maka
tidak akan bisa jika outputnya di hubungkan ke pin Digital pada arduino. Karena
pin digital hanya mengeluarkan logika HIGH (1) dan LOW (0). Pin digital lebih
cocok digunakan untuk sensor yg hanya membutuhkan inputka berupa 0 atau 1 saja
seperti flame sensor.
1
Tidak ada komentar:
Posting Komentar